Festival Drone Altitude Limit
The festival controls camera drones that rise above the pier to capture lantern formations. Engineers have a testing log showing, for selected altitudes, whether the control signal remained stable. The log is monotonic: once the signal fails at a certain altitude, every higher altitude also fails. The director must know the highest altitude that still maintains a stable signal so the drone team can plan sweeping shots without risking a drop.
You receive the altitude values and a parallel boolean array indicating stability outcomes (true for stable, false for unstable), and the altitudes are strictly increasing. Determine the largest altitude with a stable signal; return -1 if the first altitude already fails. Implement the search with binary search, leaving the inputs untouched. This quick assessment helps the camera crew choreograph drone paths, set safety ceilings, and reassure performers that aerial shots will trace the lantern glow safely.
Examples
Without test data, no safe altitude can be confirmed.
All tested altitudes fail, so no safe flight ceiling exists.
Altitude 80 is the last stable value before failure at 120.
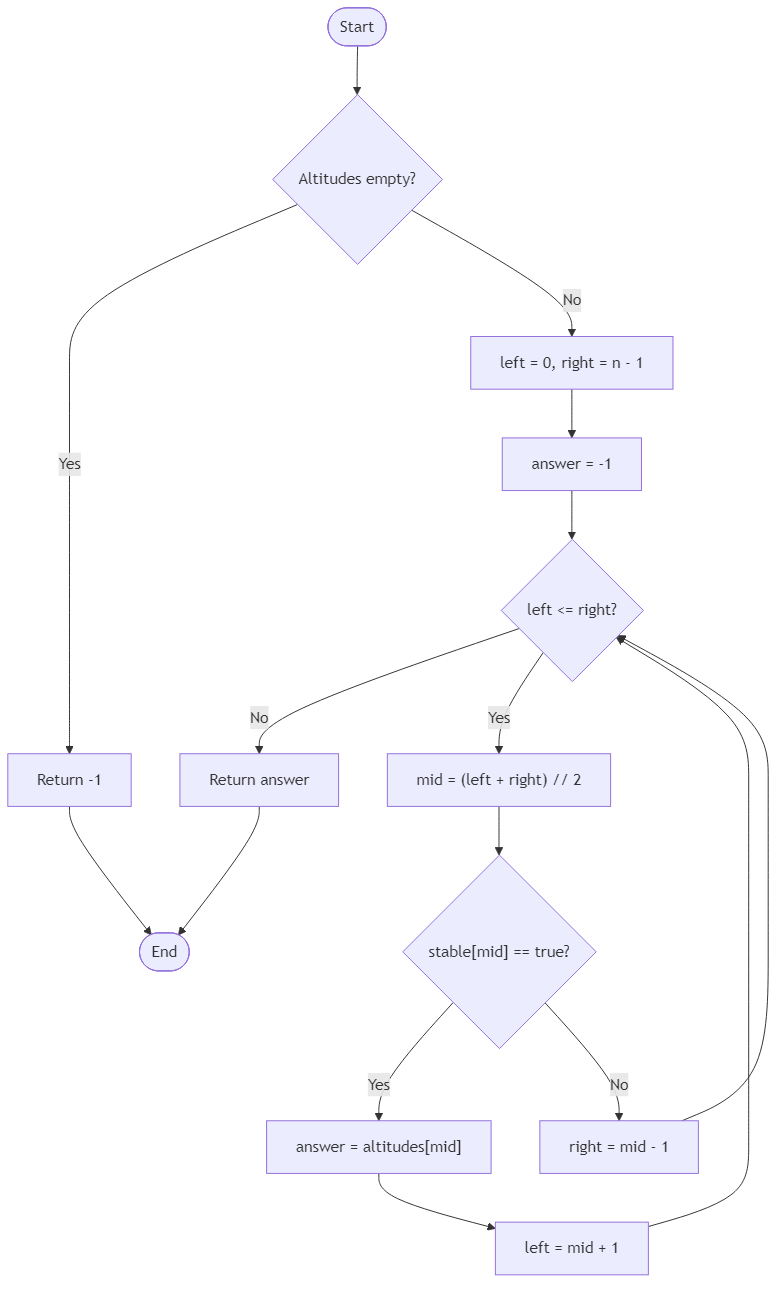
Algorithm Flow
Best Answers
class Solution {
public int festival_drone_altitude_limit(int[] nums, int limit) {
int count = 0;
for (int x : nums) if (x < limit) count++;
return count;
}
}Comments (0)
Join the Discussion
Share your thoughts, ask questions, or help others with this problem.